Datasets
Developing data hungry code, e.g. machine learning applications, comes with the burden of creating and maintaining datasets. While creating a dataset might seem to be most of the work, often enough, maintaining it is the hard part.
Our dataset format
We have defined our own labeled dataset format that uses a single .yaml file with
a description of all class ids,
a description of all attributes, and
list of all labels
Example
Let’s consider a small dataset of three images:
tree .
.
├── frame1.png
├── frame2.png
├── frame3.png
└── labels.yaml
The labels.yaml can look like this:
attributes:
- x1
- y1
- x2
- y2
- class_id
classes:
135: zebra_crossing_sign
202: CrosswalkLines
labels:
frame00001.png:
- - 381
- 66
- 436
- 113
- 135
- - -84
- 135
- 345
- 195
- 202
frame00002.png: []
frame00003.png:
- - 745
- 67
- 789
- 109
- 135
Why?
Python can easily open and construct classes out of yaml files
Class descriptions are easier to understand than integer IDs
Attributes are accessible in the beginning of each label file
How to open a dataset?
>>> import torch
>>> from kitcar_ml.utils.data.labeled_dataset import LabeledDataset
>>> dataset = LabeledDataset.from_yaml("path/to/label/file")
>>> dataloader = torch.utils.data.DataLoader(
... dataset,
... batch_size=2,
... shuffle=False,
... num_workers=1,
... )
>>> for i, data in enumerate(dataloader):
... pass
Our datasets
Here are all datasets we currently have set up and how you can download them.
1. Real images
Old labeled data
On the webdav we have a labeled dataset created for the first traffic sign recognition network.
The dataset has a different format, so we need to convert it first.
With a script you can convert it to our current data format.
But there is also a dvc stage for this conversion.
stages:
parse_old_labeled_data:
cmd: |
python3 -m kitcar_ml.utils.data.import_kitcar_xml_labels --input-dir ../../raw/real/old_labeled_data/ --output-dir old_labeled_data
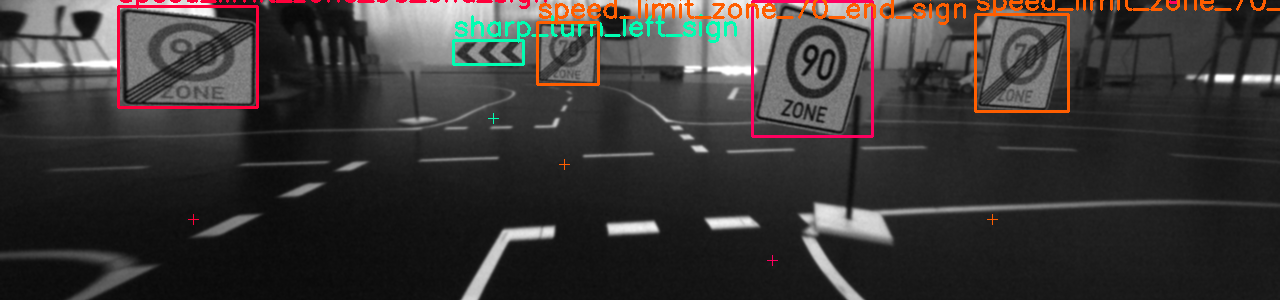
python3 -c "from kitcar_ml.utils.data.visual_labeled_dataset import VisualLabeledDataset; vl = VisualLabeledDataset.from_yaml('old_labeled_data/labels.yaml'); vl.create_debug_images('debug',sample_size=50);"
python3 -c "from kitcar_ml.utils.data.labeled_dataset import LabeledDataset; LabeledDataset.split_file('old_labeled_data/labels.yaml',{'train':0.7,'test':0.2,'val':0.1});"
python3 -m kitcar_ml.utils.data.analyse_bbox_dataset --label-file "old_labeled_data/labels.yaml" --output-folder "old_labeled_data/analysis"
deps:
- ../../../kitcar_ml/utils/data/import_kitcar_xml_labels.py
- ../../../kitcar_ml/utils/data/visual_labeled_dataset.py
- ../../../kitcar_ml/utils/data/analyse_bbox_dataset.py
- ../../../kitcar_ml/utils/data/label_conversion.yaml
- ../../raw/real/old_labeled_data
outs:
- old_labeled_data
parse_label_studio_data_standard_signs:
cmd: |
python3 -m kitcar_ml.utils.data.import_label_studio_labels --annotations-dir ../../raw/real/label_studio_annotations/object_detection_standard_signs --output-dir standard_signs
python3 -c "from kitcar_ml.utils.data.visual_labeled_dataset import VisualLabeledDataset; vl = VisualLabeledDataset.from_yaml('standard_signs/labels.yaml'); vl.create_debug_images('debug',sample_size=50);"
python3 -c "from kitcar_ml.utils.data.labeled_dataset import LabeledDataset; LabeledDataset.split_file('standard_signs/labels.yaml',{'train':0.8,'val':0.2});"
python3 -m kitcar_ml.utils.data.analyse_bbox_dataset --label-file "standard_signs/labels.yaml" --output-folder "standard_signs/analysis"
deps:
- ../../../kitcar_ml/utils/data/import_label_studio_labels.py
- ../../../kitcar_ml/utils/data/visual_labeled_dataset.py
- ../../../kitcar_ml/utils/data/analyse_bbox_dataset.py
- ../../raw/real/label_studio_annotations/object_detection_standard_signs/
outs:
- standard_signs:
persist: true
parse_label_studio_data_speed_limits:
cmd: |
python3 -m kitcar_ml.utils.data.import_label_studio_labels --annotations-dir ../../raw/real/label_studio_annotations/object_detection_speed_limits --output-dir speed_limits
python3 -c "from kitcar_ml.utils.data.visual_labeled_dataset import VisualLabeledDataset; vl = VisualLabeledDataset.from_yaml('speed_limits/labels.yaml'); vl.create_debug_images('debug',sample_size=50);"
python3 -c "from kitcar_ml.utils.data.labeled_dataset import LabeledDataset; LabeledDataset.split_file('speed_limits/labels.yaml',{'train':0.8,'val':0.2});"
python3 -m kitcar_ml.utils.data.analyse_bbox_dataset --label-file "speed_limits/labels.yaml" --output-folder "speed_limits/analysis"
deps:
- ../../../kitcar_ml/utils/data/import_label_studio_labels.py
- ../../../kitcar_ml/utils/data/visual_labeled_dataset.py
- ../../../kitcar_ml/utils/data/analyse_bbox_dataset.py
- ../../raw/real/label_studio_annotations/object_detection_speed_limits/
outs:
- speed_limits:
persist: true
parse_label_studio_data_obstacles:
cmd: |
python3 -m kitcar_ml.utils.data.import_label_studio_labels --annotations-dir ../../raw/real/label_studio_annotations/object_detection_obstacles --output-dir obstacles
python3 -c "from kitcar_ml.utils.data.visual_labeled_dataset import VisualLabeledDataset; vl = VisualLabeledDataset.from_yaml('obstacles/labels.yaml'); vl.create_debug_images('debug',sample_size=50);"
python3 -c "from kitcar_ml.utils.data.labeled_dataset import LabeledDataset; LabeledDataset.split_file('obstacles/labels.yaml',{'train':0.8,'val':0.2});"
python3 -m kitcar_ml.utils.data.analyse_bbox_dataset --label-file "obstacles/labels.yaml" --output-folder "obstacles/analysis"
deps:
- ../../../kitcar_ml/utils/data/import_label_studio_labels.py
- ../../../kitcar_ml/utils/data/visual_labeled_dataset.py
- ../../../kitcar_ml/utils/data/analyse_bbox_dataset.py
- ../../raw/real/label_studio_annotations/object_detection_obstacles/
outs:
- obstacles:
persist: true
You can download and convert the dataset with the following commands:
dvc pull data/raw/real/old_labeled_data.dvc
dvc repro data/pre_processed/real/dvc.yaml
2. Generated images
Somewhere between real and simulated datasets are generated images. They are real images artificially modified to automatically create a dataset. The first generated dataset contains real camera images from our vehicles that are supplemented with images of traffic signs.


The dataset is located at data/pre_processed/real/generated_data. It can be downloaded and/or updated using the following commands:
dvc pull data/pre_processed/real/generated_data
dvc repro data/pre_processed/real/dvc.yaml
The underlying tool can be found in kitcar_ml.utils.data_generation.data_generation_tool.
3. Simulated images
Using DVC we can easily import datasets from our simulation repository.
md5: 174fa7e322a1a970b4f2fed0372eb83e
frozen: true
deps:
- path: data/labeled_images/random_roads
repo:
url: git@git.kitcar-team.de:kitcar/kitcar-gazebo-simulation.git
rev: master
rev_lock: c275771e37692142a81e8277bd17cc8950ce608c
outs:
- md5: dadb48c84308d367fd53f78541372628.dir
size: 1134048848
nfiles: 16926
path: random_roads
hash: md5
md5: 454b0cd8128b523b033becec457d90ca
frozen: true
deps:
- path: data/labeled_images/random_roads_gan
repo:
url: git@git.kitcar-team.de:kitcar/kitcar-gazebo-simulation.git
rev: master
rev_lock: c275771e37692142a81e8277bd17cc8950ce608c
outs:
- md5: f4a8b6547f4b9a128debae6fcec4af69.dir
size: 815084441
nfiles: 2771
path: random_roads_gan
hash: md5
The dataset contains automatically generated and labeled images from simulated roads. It can be downloaded with the following command:
dvc pull -R data/raw/simulation/labeled_images
Analyzing Datasets
Dataset Analysis can be done by this tool: kitcar_ml.utils.data.analyse_bbox_dataset.
With this command you could create a detailed report for every bounding box dataset:
python3 -m kitcar_ml.utils.data.analyse_bbox_dataset --label-file LABEL_FILE --output-folder OUTPUT_FOLDER
Report
The analysis tool creates a comprehensive report, which looks something like this:
BBox Dataset Analysis
---------------------
Basic Information
Path to dataset: old_labeled_data
Number of Classes: 23
Number of Bounding Boxes: 6569
Number of Images: 3236
Image Size: (1280, 300)
Detailed Information
ID Class Name Targets Width Height Aspect Ratio
---- ------------------------------ ------------- ------------- ------------- --------------
0 pass_right_sign 376, 5.72 % 29.01 +-20.34 26.22 +-17.8 1.11 +-0.17
1 zebra_crossing_sign 338, 5.15 % 43.8 +-33.44 43.9 +-32.47 1.02 +-0.25
2 sharp_turn_left_sign 679, 10.34 % 52.03 +-59.51 23.36 +-23.19 2.3 +-0.68
3 expressway_start_sign 378, 5.75 % 50.54 +-43.33 47.33 +-40.56 1.08 +-0.24
4 priority_sign 152, 2.31 % 29.28 +-18.32 33.59 +-18.66 0.88 +-0.23
5 oncoming_traffic_sign 136, 2.07 % 37.1 +-36.56 34.38 +-29.82 1.05 +-0.16
6 parking_sign 357, 5.43 % 43.78 +-38.8 42.57 +-35.46 1.01 +-0.14
7 uphill_grade_sign 206, 3.14 % 53.84 +-43.32 45.1 +-33.48 1.16 +-0.16
8 speed_limit_zone_30_end_sign 333, 5.07 % 42.83 +-47.8 42.15 +-40.17 0.99 +-0.2
9 yield_sign 342, 5.21 % 46.75 +-34.78 40.4 +-33.28 1.18 +-0.26
10 sharp_turn_right_sign 392, 5.97 % 54.6 +-50.7 22.14 +-19.42 2.5 +-0.66
11 sharp_turn_right_small_sign 390, 5.94 % 28.98 +-26.37 26.5 +-18.92 1.06 +-0.29
12 turn_right_sign 244, 3.71 % 44.89 +-33.76 39.64 +-30.32 1.12 +-0.22
13 downhill_grade_sign 197, 3.0 % 63.84 +-45.81 53.82 +-41.21 1.2 +-0.22
14 turn_left_sign 184, 2.8 % 37.8 +-33.22 35.61 +-28.08 1.04 +-0.18
15 stop_sign 157, 2.39 % 51.5 +-33.32 51.5 +-35.61 1.03 +-0.16
16 no_overtaking_end_sign 84, 1.28 % 26.73 +-17.24 31.1 +-23.03 0.9 +-0.12
17 speed_limit_zone_30_start_sign 207, 3.15 % 49.16 +-56.22 46.25 +-46.01 1.01 +-0.17
18 sharp_turn_left_small_sign 621, 9.45 % 27.34 +-27.93 26.6 +-23.6 1.02 +-0.21
19 expressway_end_sign 388, 5.91 % 41.14 +-37.02 40.23 +-33.98 1.02 +-0.18
20 no_overtaking_start_sign 164, 2.5 % 42.37 +-20.75 43.27 +-31.42 1.05 +-0.26
21 speed_limit_zone_20_start_sign 125, 1.9 % 61.07 +-53.5 56.74 +-42.93 1.03 +-0.16
22 speed_limit_zone_20_end_sign 119, 1.81 % 65.92 +-60.24 57.38 +-46.67 1.1 +-0.16
TOTAL 6569, 100.0 % 43.49 +-42.05 36.51 +-32.72 1.27 +-0.59
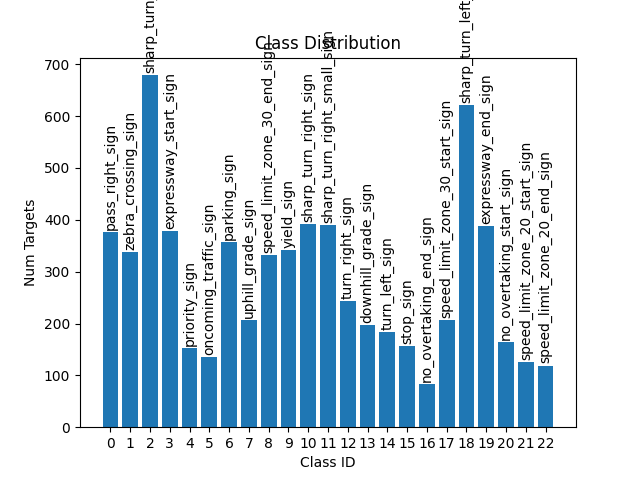
Class Distribution
To analyze the distributions of the classes in the dataset there is the class distribution diagram.
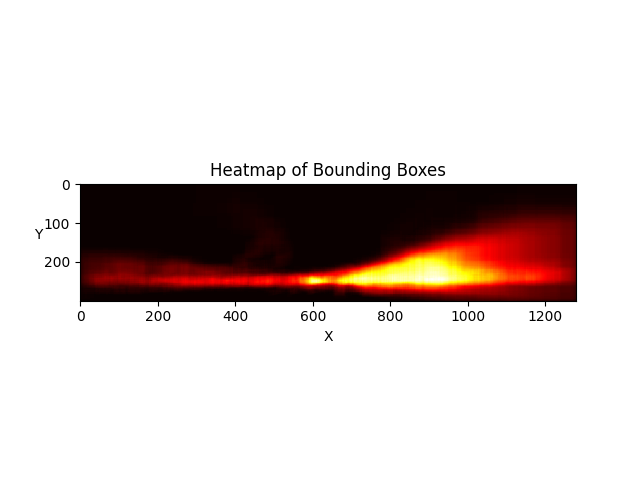
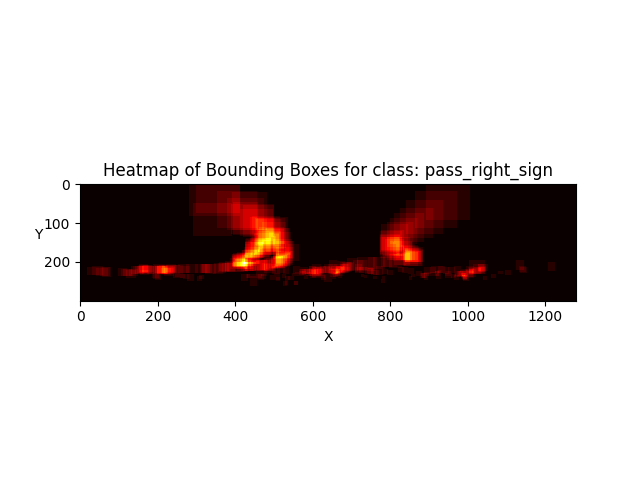
Heatmaps
A heat map visualizes for each point in the image the number of bounding boxes that cover it.